 CNC DIDACTICOS
CNC DIDACTICOS
INTERFAZ CNC (Para puerto paralelo)
El diseño de los circuitos para estos sistemas CNC se basan en sistemas modulares. Por un lado tenemos la interface, cuya funcion es comunicar la pc con los driver y a su vez forma una aislacion electrónica entre el puerto paralelo de la PC y los drivers que manejan la parte de potencia y movimientos de los motores PAP.
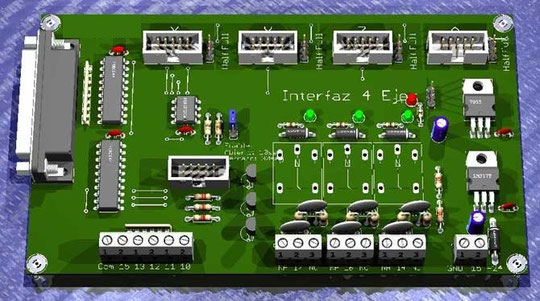
Como se puede observar la Interfaz cuenta con 4 conectores para drivers, pudiendo manejar entonces hasta 4 ejes, borneras para las 5 entradas del puerto paralelo donde se conectan los finales de carrera parada de emergencia y demás, 3 reles para el encendido del husillo, bomba de agua y aspiradora por ejemplo, conector para expansión y los reguladores de tensión, ya que a los drivers hay que alimentarlos con 5Vdc.
Los programas de CNC que trabajan por el puerto paralelo como ser el Mach, Kcam y TurboCNC entre otros, controlan cada eje principalmente con dos seńales, Paso o Clock y Dirección. También es posible controlar el enable o habilitación de los drivers desde la PC, en este cado los enables son controlarlo por Hardware. Estas seńales, llegan a la interfaz a través del puerto paralelo, y luego de aislarlas por medio de los buffers son llevadas a los drivers.
Cada drive de manera independiente al recibir un pulso (puede actuar por flanco ascendente o descendente) mueve el motor un paso (o medio paso según la configuración) según la dirección que le indica la seńal de dirección, por ejemplo en sentido horario si esta en 1 lógico y anti horario si esta en cero. Recordemos que el estado de 1 lógico corresponde a +5V. El enable lo que hace es habilitar o deshabilitar el driver, de manera que et mismo estando deshabilitado desenergiza las bobinas del motor, y con el pin Half/Full se le indica al driver si debe trabajar en modo paso entero o medio paso.
Enable por Hardware
El control del enable, o habilitación de los drivers se hace en la interfaz utilizando un PIC 12F629. Si bien la mayoría de los soft para cnc mencionados incorporan el control del enable, demanda el uso de 4 pines del puerto para dicho fin, o uno solo en caso de poder configurar para un unico enable, pero con un pic se puede hacer eso y de manera muy económica.
La forma de trabajo del pic es muy simple, cuando no hay actividad de paso en ningún eje en 10 o 30 seg, según se halla seteado, se apagan los drivers, luego al detectar un paso en cualquier eje inmediatamente se activan todos los enables. Esto es muy útil, ya que los motores paso a paso cuando están parados y energizados es cuando más consumen y más calientan.
Entradas
El puerto paralelo Tiene 5 bit´s que son entradas, las cuales tenemos disponibles en la interfaz, vemos que tenemos 6 borneras, esto es porque son las 5 entradas mas un común. Para accionar cada entrada lo que se hace es puentear entre el común y la entrada en cuestión. En la serigrafía de componentes esta descripto que pin del puerto corresponde a cada conector, como así también que pin acciona cada rele.
En los puertos paralelos de las PC mas modernas, es posible configurar el bus de datos (pin 2 al 9) como entradas, ampliando así el numero, pero ahora no es factible ya que esos pines se utilizan para el control de los drivers, esto se puede aplicar si se cuenta con dos puertos paralelos en una PC, pudiendo entonces hacer mas cómodo el conexionado de las entradas, o incluso conectar sistemas de encoders por ejemplo con el mach.
Tener solo 5 entradas es una complicación, no nos permite poner un final de carrera independiente por cada eje y demás, a esto debemos sumarle la parada de emergencia, que es muy importante y útil, incluso en el Mach es obligatoria, no se pude dejar sin configurar.
A continuacion se muestra la siguiente configuración para las entradas en una maquina de 3 ejes:

Se puede observar que una entrada se dedica a la parada de emergencia, tres a los finales de carrera agrupados por eje y por ultimo la entrada que queda se ponen los tres interruptores de Home en paralelo.
El home es la posición donde las coordenadas se van a hacer cero cuando mandemos a posicionar la maquina justamente al " Home", en ese punto las coordenadas virtuales del sistema se ponen a cero, y es posible conectar los 3 en paralelo, ya que el mach por ejemplo, previendo esto, cuando uno manda la maquina a posicionarse al home, mueve de a un eje, y al encontrar el cero retrocede liberando el pulsador para continuar con el siguiente eje. En una maquina de mas ejes, no nos queda otra que poner los limites de varios ejes todos en paralelo.